
Feature Linking#
The pyOpenMS feature grouping algorithms group corresponding features (e.g., of same analyte) from multiple FeatureMap objects into a ConsensusMap.
Linking is primarily done based on spatial proximity (e.g., similar retention time and m/z).
It is, thus, advisable to perform a map alignment before features linking.
Optionally, identification data can be considered to prevent linking of features with different identifications.
Different feature grouping algorithms with slightly different implementations are runtime characteristics are available in pyOpenMS:
We now perform feature linking using the FeatureGroupingAlgorithmQT algorithm.
Download Example Data#
1import pyopenms as oms
2from urllib.request import urlretrieve
3
4base_url = (
5 "https://raw.githubusercontent.com/OpenMS/OpenMS/develop/doc/pyopenms/src/data/"
6)
7
8feature_files = [
9 "BSA1_F1.featureXML",
10 "BSA2_F1.featureXML",
11 "BSA3_F1.featureXML",
12]
13
14feature_maps = []
15
16# download the feature files and store feature maps in list (feature_maps)
17for feature_file in feature_files:
18 urlretrieve(base_url + feature_file, feature_file)
19 feature_map = oms.FeatureMap()
20 oms.FeatureXMLFile().load(feature_file, feature_map)
21 feature_maps.append(feature_map)
Feature Linking Algorithm#
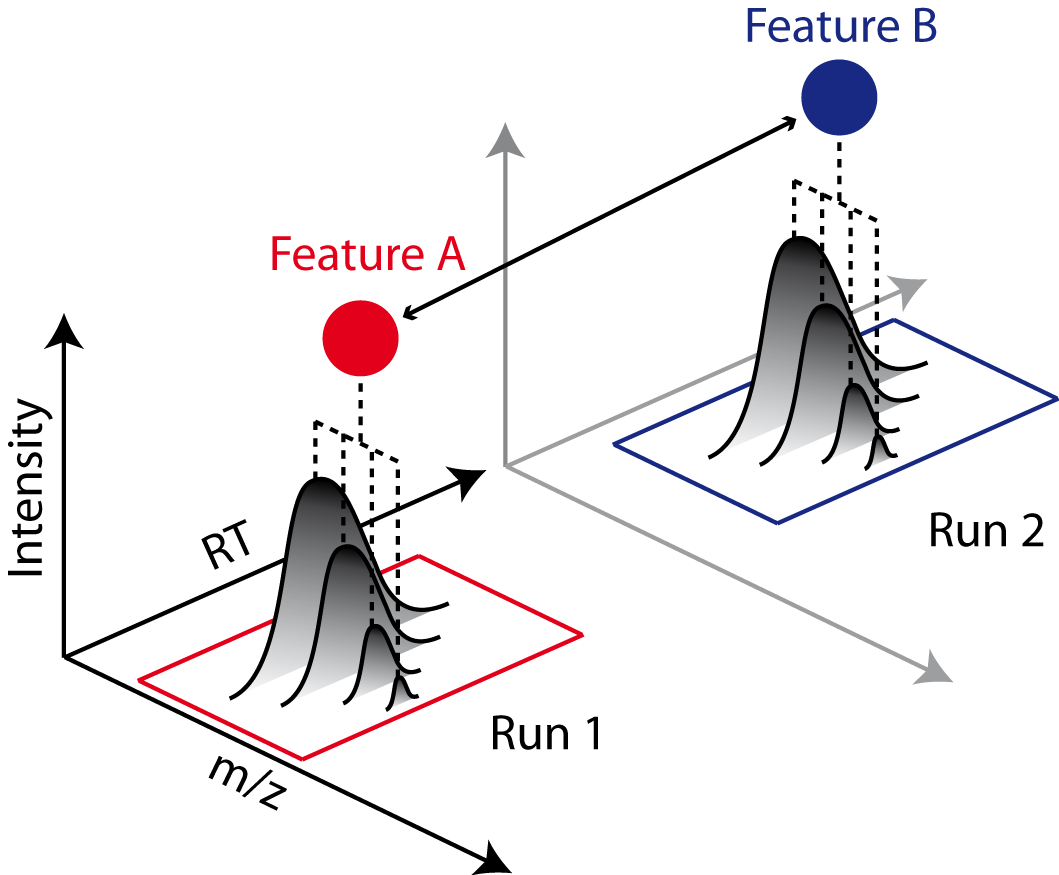
Feature linking is the process which connects (links) features with similar RT and m/z across different runs.
This enables comparisons of peptide signals across runs and is a prerequisite for downstream statistical analysis.
Thus, all features across all FeatureMap objects will be combined into a ConsensusMap.
Here we use FeatureGroupingAlgorithmQT to find corresponding features with similar RT and m/z across feature maps.
If everything goes well, we will have a lot of triplets in our test run (we have three input maps; one feature from each feature map) within each consensus feature.
Realistically, some features will remain unmatched, forming singletons or doublets (consensus features of size 1 or 2). These undersized consensus features can arise due to several factors. In some cases, the signal may be genuinely absent in the dataset, preventing feature detection. Alternatively, the feature-finding algorithm might fail to identify the feature in all available maps, leading to incomplete linkage. Additionally, suboptimal parameters for feature linking, such as excessive retention time (RT) variations across samples, can contribute to mismatches, further reducing the likelihood of forming larger consensus features. The latter can be corrected for using a process called map alignment, which we addressed in a previous chapter.
1consensus_map = oms.ConsensusMap()
2
3# populate the actual cmap using FeatureGroupingAlgorithmQT
4feature_grouper = oms.FeatureGroupingAlgorithmQT()
5# execute feature linking:
6feature_grouper.group(feature_maps, consensus_map)
That’s it! Now, we can print some summary information:
1# print some info on the consensus map
2print(f"Total number of consensus features: {consensus_map.size()}\n\n")
3
4from collections import defaultdict
5
6def compute_feature_size_stats(consensus_map):
7 size_counts = defaultdict(int) # Default value for missing keys is 0
8
9 for cfeature in consensus_map:
10 size = len(cfeature.getFeatureList())
11 size_counts[size] += 1 # No need to check if the key exists
12
13 return size_counts
14
15stats = compute_feature_size_stats(consensus_map)
16## how many consensus features are there which contain features from 1, 2, or all 3 feature maps?
17print("ConsensusFeature Size Distribution:", dict(stats), "\n\n")
18
19for (i, cfeature) in enumerate(consensus_map):
20 if i > 3:
21 break
22 print(
23 f"ConsensusFeature: average int: {cfeature.getIntensity()}, RT: {cfeature.getRT()}, m/z: {cfeature.getMZ()}"
24 )
25 # The two features in map 1 and map 2 represent the same analyte at
26 # slightly different RT and m/z
27 for fh in cfeature.getFeatureList():
28 print(f" -- Feature: map#: {fh.getMapIndex()}, int: {fh.getIntensity()}, RT: {fh.getRT()}")
This then prints:
Map 0: Filename = BSA1_F1.featureXML, Size = 256, UniqueID = 15391035140702131759
Map 1: Filename = BSA2_F1.featureXML, Size = 235, UniqueID = 4409371154349730995
Map 2: Filename = BSA3_F1.featureXML, Size = 204, UniqueID = 16851873442542870272
Total number of consensus features: 474
ConsensusFeature Size Distribution: {3: 55, 2: 111, 1: 308}
ConsensusFeature: average int: 674365.6875, RT: 1925.75138611056, m/z: 387.7128198087733
-- Feature: map#: 0, int: 1432460.0, RT: 1961.42395727216
-- Feature: map#: 1, int: 285228.0, RT: 1914.26950841529
-- Feature: map#: 2, int: 305409.0, RT: 1901.56069264423
ConsensusFeature: average int: 1154167.0, RT: 1787.5601793634498, m/z: 662.2911690419279
-- Feature: map#: 0, int: 834075.0, RT: 1836.92005770327
-- Feature: map#: 1, int: 2119760.0, RT: 1748.02632036743
-- Feature: map#: 2, int: 508666.0, RT: 1777.73416001965
ConsensusFeature: average int: 562620.0, RT: 1650.6520418306134, m/z: 779.7355985805051
-- Feature: map#: 0, int: 661665.0, RT: 1662.1136104186
-- Feature: map#: 1, int: 751397.0, RT: 1616.78250841374
-- Feature: map#: 2, int: 274798.0, RT: 1673.0600066595
ConsensusFeature: average int: 23445466.0, RT: 1877.1572820450535, m/z: 738.310987605286
-- Feature: map#: 0, int: 34988800.0, RT: 1901.57762589719
-- Feature: map#: 1, int: 25276700.0, RT: 1849.00759248543
-- Feature: map#: 2, int: 10070900.0, RT: 1880.88662775254
The results here are not ideal, since we only found 55 features which are present in all three feature maps. The remaining consensus features have a missing value for at least one feature map. We could tweak the parameters used for grouping, but you should make sure that the, for example, acceptable RT deltas are sensible. There is a tradeoff between sensitivity and specificity here.
Finally, we add some meta-data to the consensus map, which allows us to track the input data later on if we were to store the consensus map to disk.
1file_descriptions = consensus_map.getColumnHeaders()
2
3# collect information about input maps ...
4for i, feature_map in enumerate(feature_maps):
5 file_description = file_descriptions.get(i, oms.ColumnHeader())
6 file_description.filename = feature_files[i] ## filename
7 file_description.size = feature_map.size()
8 file_description.unique_id = feature_map.getUniqueId()
9 file_descriptions[i] = file_description
10# ... and store them in the column headers of the cmap
11consensus_map.setColumnHeaders(file_descriptions)
12
13# print the information on underlying feature maps which we just collected
14file_descriptions = consensus_map.getColumnHeaders()
15for index, header in file_descriptions.items():
16 print(f"Map {index}: Filename = {header.filename}, Size = {header.size}, UniqueID = {header.unique_id}")